Vehicle Detection And Recognition with OpenVINO¶
This tutorial demonstrates how to use two pre-trained models from Open
Model Zoo:
vehicle-detection-0200
for object detection and
vehicle-attributes-recognition-barrier-0039
for image classification. Using these models, we will detect vehicles
from raw images and recognize attributes of detected vehicles.
Finally, we will get the result:
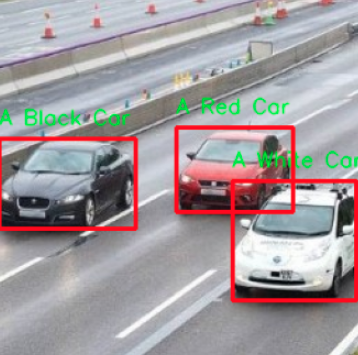
result¶
Imports¶
Import the required modules.
import os
import sys
from pathlib import Path
from typing import Tuple
import cv2
import numpy as np
import matplotlib.pyplot as plt
from openvino.runtime import Core
sys.path.append("../utils")
import notebook_utils as utils
Download Models¶
We use omz_downloader, which is a command-line tool from the
openvino-dev package. omz_downloader automatically creates a
directory structure and downloads the selected model. This step is
skipped if the model is already downloaded. The selected model comes
from the public directory, which means it must be converted into
Intermediate Representation (IR).
Note: If you want to change the model, you need to modify the model name, such as
"vehicle-detection-0201","vehicle-detection-0202". They support different image input sizes in detection. Besides, you can change recognition model to"vehicle-attributes-recognition-barrier-0042", They are trained from different deep learning frames. If you want to change the precision, you need to modify the precision value in"FP32","FP16","FP16-INT8", different type has different model size and precision value.
# Directory where model will be downloaded
base_model_dir = "model"
# Model name as named in Open Model Zoo
detection_model_name = "vehicle-detection-0200"
recognition_model_name = "vehicle-attributes-recognition-barrier-0039"
# Selected precision (FP32, FP16, FP16-INT8)
precision = "FP32"
# Check if the model exists
detection_model_path = (
f"model/intel/{detection_model_name}/{precision}/{detection_model_name}.xml"
)
recognition_model_path = (
f"model/intel/{recognition_model_name}/{precision}/{recognition_model_name}.xml"
)
# Download the detection model
if not os.path.exists(detection_model_path):
download_command = f"omz_downloader " \
f"--name {detection_model_name} " \
f"--precision {precision} " \
f"--output_dir {base_model_dir}"
! $download_command
# Download the recognition model
if not os.path.exists(recognition_model_path):
download_command = f"omz_downloader " \
f"--name {recognition_model_name} " \
f"--precision {precision} " \
f"--output_dir {base_model_dir}"
! $download_command
################|| Downloading vehicle-detection-0200 ||################
========== Downloading model/intel/vehicle-detection-0200/FP32/vehicle-detection-0200.xml
========== Downloading model/intel/vehicle-detection-0200/FP32/vehicle-detection-0200.bin
################|| Downloading vehicle-attributes-recognition-barrier-0039 ||################
========== Downloading model/intel/vehicle-attributes-recognition-barrier-0039/FP32/vehicle-attributes-recognition-barrier-0039.xml
========== Downloading model/intel/vehicle-attributes-recognition-barrier-0039/FP32/vehicle-attributes-recognition-barrier-0039.bin
Load Models¶
In this notebook, we will need a detection model and a recognition
model. After downloading the models, we initialize inference engine
runtime (IECore), and use read_network to read network architecture
and weights from .xml and.bin files. Then, we compile it to the
specified device with compile_model().
# Initialize inference engine runtime
ie_core = Core()
def model_init(model_path: str) -> Tuple:
"""
Read the network and weights from file, load the
model on the CPU and get input and output names of nodes
:param: model: model architecture path *.xml
:retuns:
input_key: Input node network
output_key: Output node network
exec_net: Encoder model network
net: Model network
"""
# Read the network and corresponding weights from file
model = ie_core.read_model(model=model_path)
# compile the model for the CPU (you can use GPU or MYRIAD as well)
compiled_model = ie_core.compile_model(model=model, device_name="CPU")
# Get input and output names of nodes
input_keys = compiled_model.input(0)
output_keys = compiled_model.output(0)
return input_keys, output_keys, compiled_model
Get attributes from model¶
We use input_keys.shape to get data shapes
# de -> detection
# re -> recognition
# Detection model initialization
input_key_de, output_keys_de, compiled_model_de = model_init(detection_model_path)
# Recognition model initialization
input_key_re, output_keys_re, compiled_model_re = model_init(recognition_model_path)
# Get input size - Detection
height_de, width_de = list(input_key_de.shape)[2:]
# Get input size - Recognition
height_re, width_re = list(input_key_re.shape)[2:]
Helper function¶
plt_showfunction is used to show image
def plt_show(raw_image):
"""
Use matplot to show image inline
raw_image: input image
:param: raw_image:image array
"""
plt.figure(figsize=(10, 6))
plt.axis("off")
plt.imshow(raw_image)
Read and display a test image¶
For the detection model’s input shape is [1, 3, 256, 256], so we
need to resize the image size to 256 x 256, and expand batch channel
with expand_dims function.
# Load an image
url = "https://storage.openvinotoolkit.org/data/test_data/images/person-bicycle-car-detection.bmp"
filename = "cars.jpg"
directory = "data"
image_file = utils.download_file(
url, filename=filename, directory=directory, show_progress=False, silent=True,timeout=30
)
assert Path(image_file).exists()
# Read an image
image_de = cv2.imread("data/cars.jpg")
# Resize to [3, 256, 256]
resized_image_de = cv2.resize(image_de, (width_de, height_de))
# Expand to [1, 3, 256, 256]
input_image_de = np.expand_dims(resized_image_de.transpose(2, 0, 1), 0)
# Show image
plt_show(cv2.cvtColor(image_de, cv2.COLOR_BGR2RGB))

Use detection model to detect vehicles¶
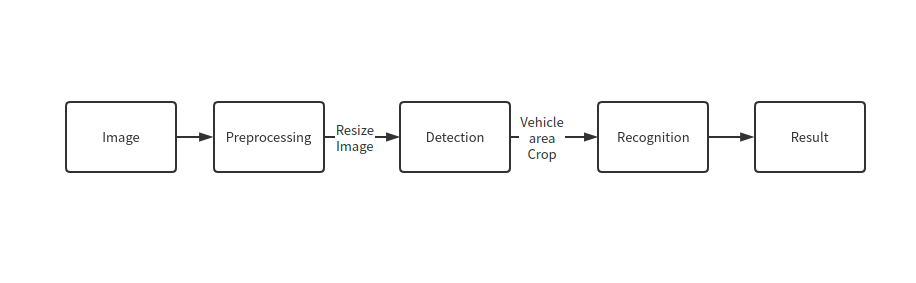
pipline¶
As shown in the flowchart, images of individual vehicles are sent to the
recognition model. First, we use infer function to get the result.
The detection model output has the format [image_id, label, conf, x_min, y_min, x_max, y_max], where:
image_id - ID of the image in the batch
label - predicted class ID (0 - vehicle)
conf - confidence for the predicted class
(x_min, y_min) - coordinates of the top left bounding box corner
(x_max, y_max) - coordinates of the bottom right bounding box corner
Delete unused dims and filter out results that are not used.
# Run Inference
boxes = compiled_model_de([input_image_de])[output_keys_de]
# delete the dim of 0, 1
boxes = np.squeeze(boxes, (0, 1))
# Remove zero only boxes
boxes = boxes[~np.all(boxes == 0, axis=1)]
Detection Processing¶
In this function, we change the ratio to the real position in the image, then we filter out low-confidence results
def crop_images(bgr_image, resized_image, boxes, threshold=0.6) -> np.ndarray:
"""
Use bounding boxes from detection model to find the absolute car position
:param: bgr_image: raw image
:param: resized_image: resized image
:param: boxes: detection model returns rectangle position
:param: threshold: confidence threshold
:returns: car_position: car's absolute position
"""
# Fetch image shapes to calculate ratio
(real_y, real_x), (resized_y, resized_x) = bgr_image.shape[:2], resized_image.shape[:2]
ratio_x, ratio_y = real_x / resized_x, real_y / resized_y
# Find the boxes ratio
boxes = boxes[:, 2:]
# Store the vehicle's position
car_position = []
# Iterate through non-zero boxes
for box in boxes:
# Pick confidence factor from last place in array
conf = box[0]
if conf > threshold:
# Convert float to int and multiply corner position of each box by x and y ratio
# In case that bounding box is found at the top of the image,
# we position upper box bar little bit lower to make it visible on image
(x_min, y_min, x_max, y_max) = [
int(max(corner_position * ratio_y * resized_y, 10)) if idx % 2
else int(corner_position * ratio_x * resized_x)
for idx, corner_position in enumerate(box[1:])
]
car_position.append([x_min, y_min, x_max, y_max])
return car_position
# Find car position
car_position = crop_images(image_de, resized_image_de, boxes)
Recognize vehicle attributes¶
Select one of the detected boxes, then crop to area containing the vehicle to test with recognition model. Again, we need to resize the input image and run infererence.
# Select a vehicle to recognize
pos = car_position[0]
# Crop the image with [y_min:y_max, x_min:x_max]
test_car = image_de[pos[1]:pos[3], pos[0]:pos[2]]
# resize image to input_size
resized_image_re = cv2.resize(test_car, (width_re, height_re))
input_image_re = np.expand_dims(resized_image_re.transpose(2, 0, 1), 0)
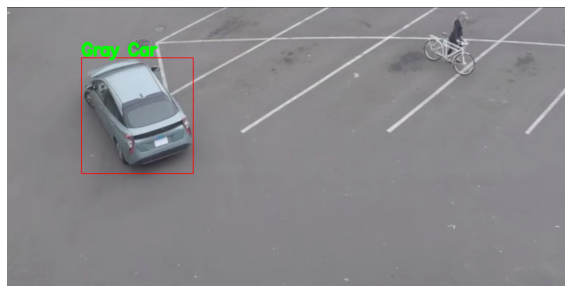
plt_show(cv2.cvtColor(resized_image_re, cv2.COLOR_BGR2RGB))

Recognition processing¶
The result contains vehicle colors (white, gray, yellow, red, green, blue, black) and vehicle types (car, bus, truck, van). Next, we need to calculate the probability of each attribute. Finally, we determine the maximum probability as the result.
def vehicle_recognition(compiled_model_re, input_size, raw_image):
"""
Vehicle attributes recognition, input a single vehicle, return attributes
:param: compiled_model_re: recognition net
:param: input_size: recognition input size
:param: raw_image: single vehicle image
:returns: attr_color: predicted color
attr_type: predicted type
"""
# vehicle's attribute
colors = ['White', 'Gray', 'Yellow', 'Red', 'Green', 'Blue', 'Black']
types = ['Car', 'Bus', 'Truck', 'Van']
# resize image to input size
resized_image_re = cv2.resize(raw_image, input_size)
input_image_re = np.expand_dims(resized_image_re.transpose(2, 0, 1), 0)
# Run Inference
# Predict Result
predict_colors = compiled_model_re([input_image_re])[compiled_model_re.output(1)]
# delete the dim of 2, 3
predict_colors = np.squeeze(predict_colors, (2, 3))
predict_types = compiled_model_re([input_image_re])[compiled_model_re.output(0)]
predict_types = np.squeeze(predict_types, (2, 3))
attr_color, attr_type = (colors[np.argmax(predict_colors)],
types[np.argmax(predict_types)])
return attr_color, attr_type
print(f"Attributes:{vehicle_recognition(compiled_model_re, (72, 72), test_car)}")
Attributes:('Gray', 'Car')
Conbine two models¶
Congratulations! We succeassfully used a detection model to crop an image with a vehicle and recognize the vehicle attributes.
def convert_result_to_image(compiled_model_re, bgr_image, resized_image, boxes, threshold=0.6):
"""
Use Detection model boxes to draw rectangles and plot the result
:param: compiled_model_re: recognition net
:param: input_key_re: recognition input key
:param: bgr_image: raw image
:param: resized_image: resized image
:param: boxes: detection model returns rectangle position
:param: threshold: confidence threshold
:returns: rgb_image: processed image
"""
# Define colors for boxes and descriptions
colors = {"red": (255, 0, 0), "green": (0, 255, 0)}
# Convert base image from bgr to rgb format
rgb_image = cv2.cvtColor(bgr_image, cv2.COLOR_BGR2RGB)
# Find cars' positions
car_position = crop_images(image_de, resized_image, boxes)
for x_min, y_min, x_max, y_max in car_position:
# Run vehicle recognition inference
attr_color, attr_type = vehicle_recognition(compiled_model_re, (72, 72),
image_de[y_min:y_max, x_min:x_max])
# close the vehicle window
plt.close()
# Draw bounding box based on position
# Parameters in rectangle function are: image, start_point, end_point, color, thickness
rgb_image = cv2.rectangle(rgb_image, (x_min, y_min), (x_max, y_max), colors["red"], 2)
# Print vehicle attributes
# parameters in putText function are: img, text, org, fontFace, fontScale, color, thickness, lineType
rgb_image = cv2.putText(
rgb_image,
f"{attr_color} {attr_type}",
(x_min, y_min - 10),
cv2.FONT_HERSHEY_SIMPLEX,
2,
colors["green"],
10,
cv2.LINE_AA
)
return rgb_image
plt_show(convert_result_to_image(compiled_model_re, image_de, resized_image_de, boxes))